DOLANG DLDS-1508 Industrial robot application training system
制造商: DOLANG Model: DLDS-1508 保障: 12 Month - 联系
1 input power: single phase 3-line AC220V±10% 50HZ.
2 Working environment: temperature -10℃-+40℃, relative humidity <85% (25℃), no condensation of water droplets at the altitude <4000m
3 output power:
(1) AC single phase 220V±10% 50HZ ;starting switch control output.
(2) DC regulated voltage power: 24V/5A.
4 Equipment dimension: 1900*900*1500 mm(L*W*H)
5 Safety protection function: emergency stop button, leakage protection.
6 PLC: Siemens (optional model)
7 ABB six joint robot:
(1) robot model: IRB120-3/0.58.
(2) Maximum grab weight: 3KG.
(3) action semidiameter: 0.58m.
(4) Repeated positioning accuracy: 0.01mm.
8 Berger Lahr manipulator
(1) X axis stroke: 500mm;
(2) Y axis stroke: 500mm;
(3) Z axis stroke: 150mm;
(4) Rotation angle of rotating shaft: 180°.
Datasheet
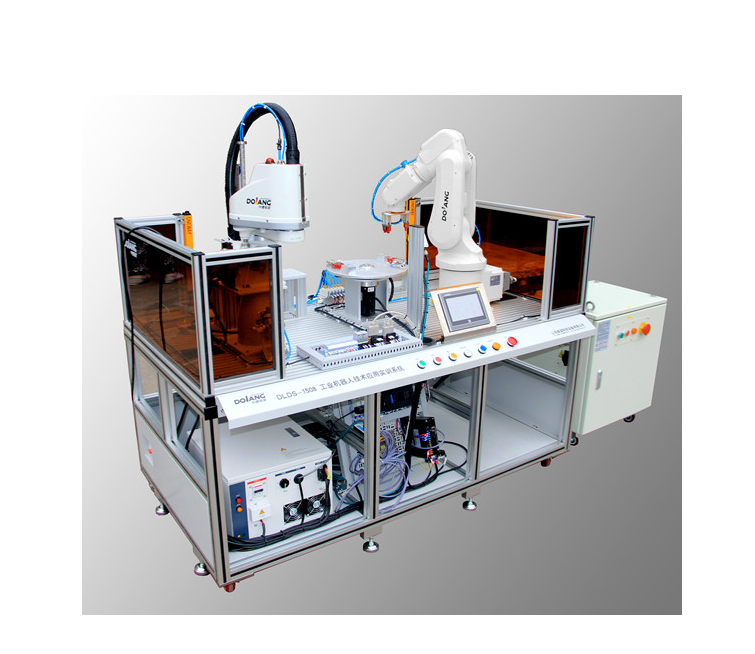
DLDS-1508 industrial robot application training system consist of training platform, spare parts store, four axis Berger Lahr mechanical handling unit, ring assembly inspection mechanism, ABB six joint industrial robot assembly sorting unit, visual detection device, finished product storehouse.
The main task of the device is based on MES management software, order demand, Berger Lahr robot grab the corresponding to red or yellow, blue button cap and other button assembly parts from the spare parts store. And the assembly part is placed in fixed position of ring assembly detecting mechanism. Then assembly structure detection is rotated 180 degrees, reach the assembly inspection station of robot with six degrees of freedom. robot with six degrees of freedom caring on the button assembly, after the completion of the assembly, the power supply mechanism send electricity to the button. The robot presses the button, then through vision cameras to detect and judge the button’s color and quality, the six degree of freedom robot according to the data of the vision camera for classification. Thereby it is carried on the finished product store.
- 质量承诺
- 正品保修
- 送货到家
- 交易简单化
