该解决方案结合了相机视觉和机器人
Hệ
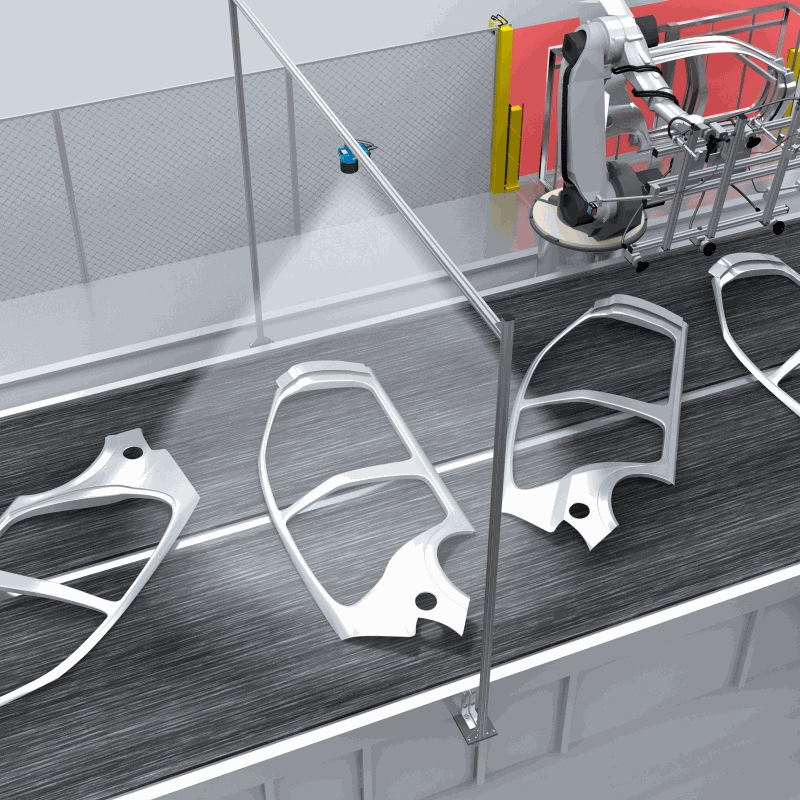
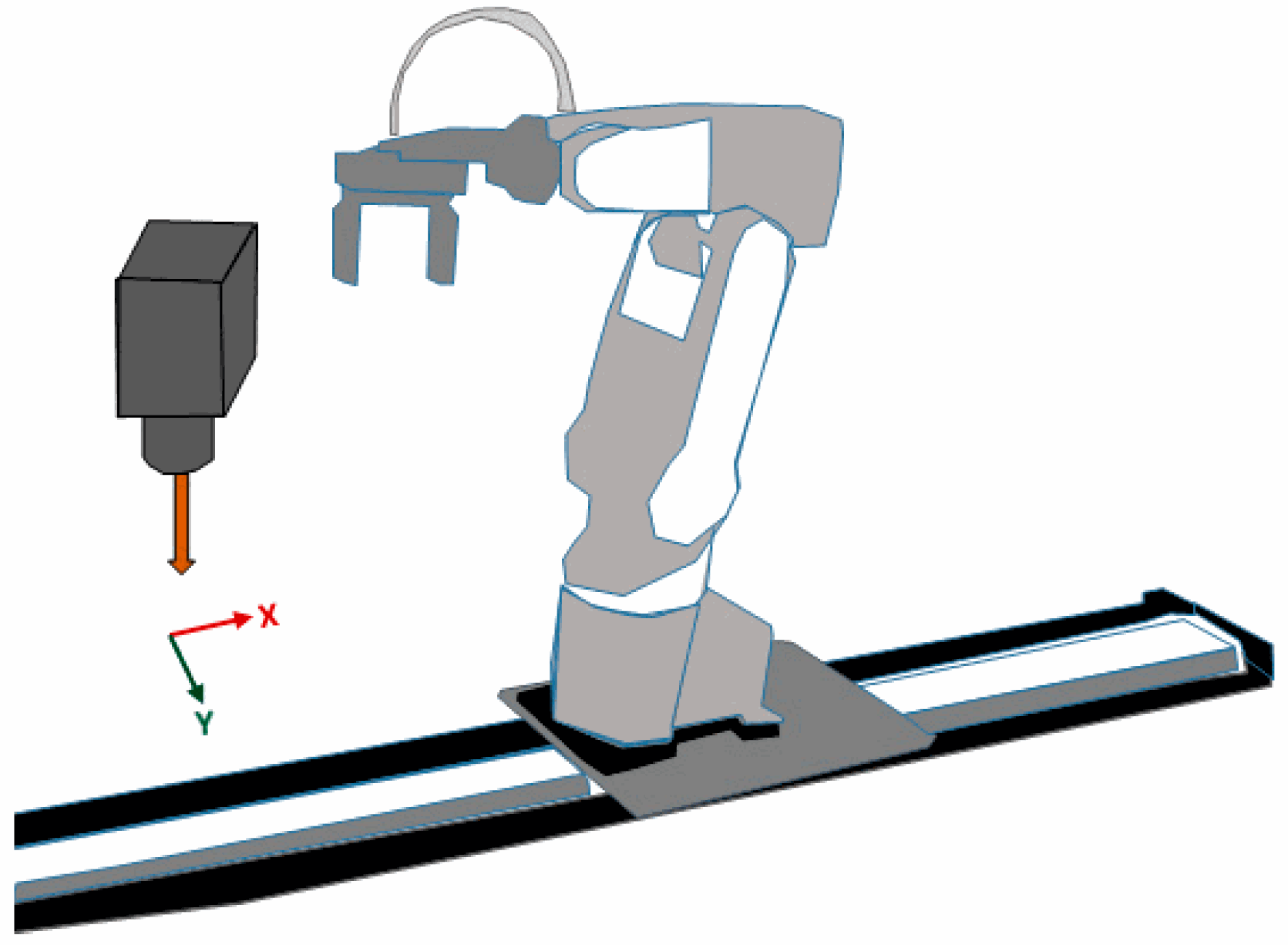
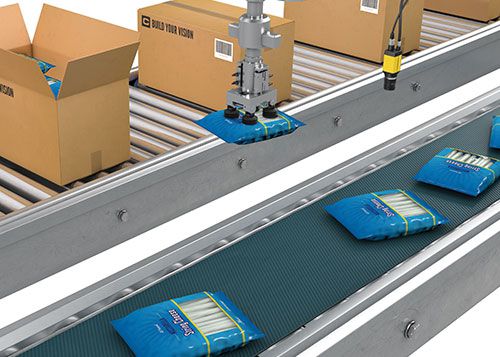
Hệ thống gồm kết nối giữa camera vision 2D và Robot. Hệ thống sẽ được hiệu chỉnh để chung điểm gốc tọa độ.Camera sẽ chụp lại vị trí của sản phẩm sau đó sẽ gửi tọa độ hiện tại của sản phẩm cho robot. Robot sẽ so sánh tọa độ gốc so với tọa độ hiện tại để xác định độ xoay của vật thể. Từ tọa độ đó Robot sẽ gắp sản phẩm theo đúng một vị trí đã được cài đặt.
Một số hệ thống đã ứng dụng sử dụng camera vision kết hợp Robot.


Mọi chi tiết về giải pháp xin liên hệ với chúng tôi để được tư vấn và hỗ trợ miễn phí.
